Locatiereferentie VILD/ALERT-C bij Verkeersgegevens
Inleiding
Verkeersgegevens worden ingewonnen op een specifiek punt op de weg (meetpunt) of als traject op de weg (meetvak). Om de exacte locatie van de inwinning te specificeren wordt gebruik gemaakt van de locatiereferentie op basis van VILD/ALERT-C. De manier waarop de locatiereferentie dient te worden opgesteld en geïnterpreteerd is verschillend voor meetpunten en meetvakken.
Locatiereferentie voor meetpunten
Ter illustratie zijn hieronder meerdere varianten opgenomen van inwinning op een punt op de weg.
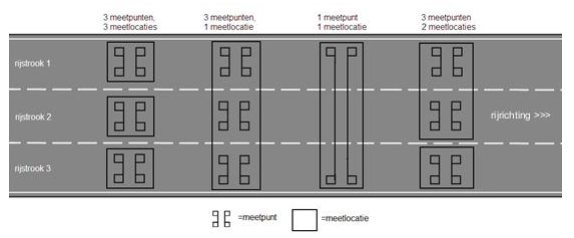
Middels bovenstaande illustratie wordt het onderscheid toegelicht tussen een meetpunt en een meetlocatie. Een meetlocatie bestaat uit (één of meer) meetpunt(en). Locatiereferentie in DATEX II wordt beschreven aan de hand van de rijrichting van het verkeer, het stroomopwaarts dichtstbijzijnde VILD punt en de afstand tussen de VILD locatie en de meetlocatie.
Met behulp van onderstaand voorbeeld is de manier beschreven waarop de locatiereferentie tot stand komt. In het voorbeeld zijn meetlocaties zichtbaar als groene circels, en VILD punten als blauwe circels. De meetlocatie die toegelicht wordt, is geselecteerd middels de rode circel.

Ter ondersteuning van het voorbeeld is onderstaande schematische weergave opgenomen van de situatie, waarin enkel de relevante informatie is opgenomen.
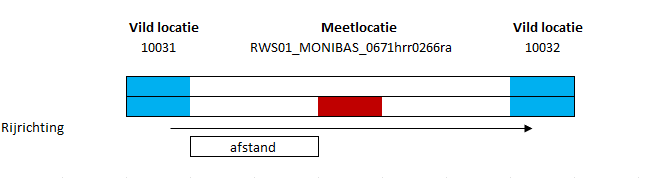
De VILD informatie behorende bij de getoonde punten is hieronder opgenomen.

Coderen van een meetlocatie op basis van VILD/ALERT-C
De volgende stappen beschrijven hoe je de rijrichting van het verkeer, het stroomopwaarts dichtstbijzijnde VILD punt en de afstand tussen de VILD locatie en de meetlocatie kunt bepalen.
Afwijking in wijze van bepalen VILD locatie
Onderstaande beschrijving hanteert bewust afwijkende definities van de primaire en secundaire locatie, omwillen van de in Nederland uitzonderlijke situatie gekozen voor het beschrijven van een meetlocatie.
- Start vanuit het punt van de meetlocatie
- Bepaal het primaire VILD punt van de meetlocatie. Doe dit door het dichtstbijzijnde toegestane VILD punt stroomopwaarts te vinden (dus voor de meetlocatie gelegen, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor AVG uitgesloten punten. Zie hiervoor Locatietype punten.
- In bovenstaand voorbeeld is het locatienummer van het gevonden VILD punt 10031
- Bepaal het secundaire VILD punt van de meetlocatie. Doe dit door het het dichtstbijzijnde VILD punt te selecteren stroomafwaarts (dus na de meetlocatie, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Hierbij hoef je geen rekening te houden met de uitgesloten VILD punten voor AVG.
- In bovenstaand voorbeeld is het locatienummer van het gevonden VILD punt 10032
- Bepaal de VILD richting van de meetlocatie, deze kan de waarde positief of negatief hebben. Doe dit door de keten te volgen om van het primaire VILD punt naar het secundaire VILD punt te komen, startende bij het primaire VILD punt.
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld POS_OFF
- Als de waarde van het veld POS_OFF gelijk is aan het secundaire VILD punt, dan is de VILD richting positief
- Als de waarde van het veld POS_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld POS_OFF van het huidige VILD tabel record totdat de waarde 0 is gevonden of de waarde van het primaire VILD punt
- Controleer of de VILD richting negatief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld NEG_OFF
- Als de waarde van het veld NEG_OFF gelijk is aan het secundaire VILD punt, dan is de VILD richting negatief
- Als de waarde van het veld NEG_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld NEG_OFF van het huidige VILD tabel record record totdat de waarde 0 is gevonden of de waarde van het primaire VILD punt
- In bovenstaand voorbeeld is de VILD richting positief, doordat het veld POS_OFF van VILD record 10031 de waarde kent van het secundaire VILD punt
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bepaal de afstand tot de VILD locatie door de lengte te berekenen tussen de meterpositie van het primaire VILD punt en de meterpositie van de meetlocatie
- De hectometer positie van het VILD punt is vastgesteld in stap 5, de meterpositie is de hectometer positie * 100
- De meter positie van de meetlocatie dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het primaire VILD punt - meterpositie van de meetlocatie
- In het bovenstaande voorbeeld is de hectometer van het VILD punt 256, de meterpositie is dus 25600. De meterpositie van de meetlocatie is 26630. De afstand tot de VILD locatie is dus 1030 meter (26630-25600).
Het primaire VILD punt, de VILD richting en de afstand van de meetlocatie tot het VILD punt dienen opgenomen te worden in het DATEX II element AlertCPoint.
Decoderen van een meetlocatie op basis van VILD/ALERT-C
De volgende stappen beschrijven hoe vanuit de VILD/ALERT-C locatiereferentie de positie op de weg van de meetlocatie kunt bepalen, aan de hand van de informatie opgenomen in het DATEX II element AlertCPoint in v2.3 of AlertCPoint in v3:
- Start vanuit het primaire VILD punt van de meetlocatie, gebruik tevens de VILD richting van het meetlocatie en de afstand tot het VILD punt
- Bepaal de wegnaam en het traject
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde van het veld LINREF
- Zoek in de VILD tabel het record op van de VILD weg, gebruik makende van de waarde van het LINREF
- De wegnaam is opgenomen in het veld ROADNUMBER, het traject is af te leiden uit de namen in de velden FIRST_NAME en SECND_NAME
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bereken de meter positie van de meetlocatie
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HSTART_POS + (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HSTART_NEG + (-1 * HECTO_DIR * [afstand to het VILD punt])
- Leidt de baan af waarop de meetlocatie zich bevindt door middel van de waarde van het DATEX II element carriageway
De positie op de weg van de meetlocatie kan hiermee worden beschreven als wegnaam, traject, baan en meterpositie.
Locatiereferentie voor meetvakken
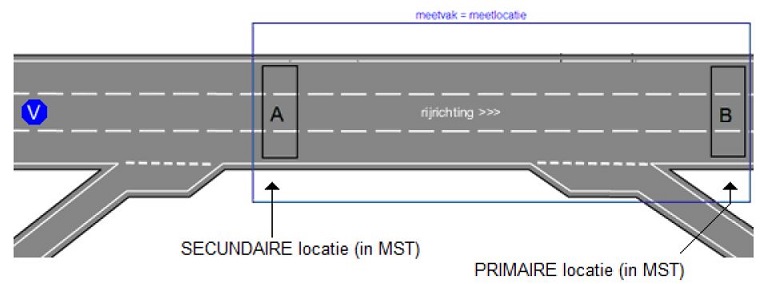
Met behulp van een meetvak wordt een traject op de weg aangeduid waarover inwinning plaats vindt. In dit geval is de meetlocatie gelijk aan het gehele meetvak.
Ter illustratie is hieronder een voorbeeld opgenomen van inwinning op traject op de weg.
Bij het beschrijven van locatiereferentie van een meetvak zijn in DATEX II op basis van VILD/ALERT-C, is het van belang te weten dat een traject in VILD/ALERT-C altijd dient te starten en eindigen op dezelfde VILD-weg. Dit betekent dat als een meetvak start op weg A en eindigt op weg B, er twee aansluitende VILD/ALERT-C trajecten dienen te worden opgenomen in DATEX II. Dit is opgelost in het DATEX II datamodel door gebruik te maken van het element ItineraryByIndexedLocations. Onder dit element kunnen meedere locaties als lijn (Linear) beschreven worden.
Omgaan met verbindingswegen
Indien een deel van het meetvak loopt via een verbindingsweg (connectingCarriageway), dient voor dit deel van de weg een aparte linear te worden opgenomen. Bijvoorbeeld in het geval van een meetvak dat begint op snelweg 1 en via een verbindingsweg naar het eindpunt op snelweg 2 loopt. In totaal dienen er dan 3 linears te zijn: linear1 op snelweg 1, linear2 op verbindingsweg en linear3 op snelweg 2.
Coderen van een meetvak op basis van VILD/ALERT-C
Een meetvak wordt per Linear in v2.3 of SingleRoadLinearLocation in v3 gedefinieerd aan de hand van de rijrichting van het verkeer, de stroomopwaarts en -afwaarts dichtstbijzijnde VILD locaties en de afstand tot deze locaties. De volgende stappen beschrijven hoe je de hierboven genoemde waarden kunt bepalen:
- Start vanuit het middelpunt van de Linear/het meetvak
- Bepaal het primaire VILD punt. Doe dit door het dichtstbijzijnde toegestane VILD punt stroomafwaarts (dus na de Linear/het meetvak, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor AVG uitgesloten punten. Zie hiervoor Locatietype punten.
- Bepaal het secundaire VILD punt van de meetlocatie. Doe dit door het het dichtstbijzijnde VILD punt te selecteren stroomopwaarts te vinden (dus voor de Linear/het meetvak gelegen, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor AVG uitgesloten punten. Zie hiervoor Locatietype punten.
- Bepaal de VILD richting van de meetlocatie, deze kan de waarde positief of negatief hebben. Doe dit door de keten te volgen om van het primaire VILD punt naar het secundaire VILD punt te komen, startende bij het primaire VILD punt.
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld POS_OFF
- Als de waarde van het veld POS_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting positief
- Als de waarde van het veld POS_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld POS_OFF van het huidige VILD tabel record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- Controleer of de VILD richting negatief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld NEG_OFF
- Als de waarde van het veld NEG_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting negatief
- Als de waarde van het veld NEG_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld NEG_OFF van het huidige VILD tabel record record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bepaal de afstand tot het primaire VILD punt door de lengte te berekenen tussen de meterpositie van het primaire VILD punt en de meterpositie van de meetlocatie
- De hectometer positie van het VILD punt is vastgesteld in stap 5, de meterpositie is de hectometer positie * 100
- De meter positie van de meetlocatie dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het primaire VILD punt - meterpositie van de meetlocatie
- Bepaal de hectometer waarde van het secundaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bepaal de afstand tot het secundaire VILD punt door de lengte te berekenen tussen de meterpositie van het secundaire VILD punt en de meterpositie van de meetlocatie
- De hectometer positie van het VILD punt is vastgesteld in stap 7, de meterpositie is de hectometer positie * 100
- De meter positie van de meetlocatie dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het secundaire VILD punt - meterpositie van de meetlocatie)
Zie onderstaande illustratie voor een visualisatie van bovenstaande wijze van bepalen van de locatiereferentie.
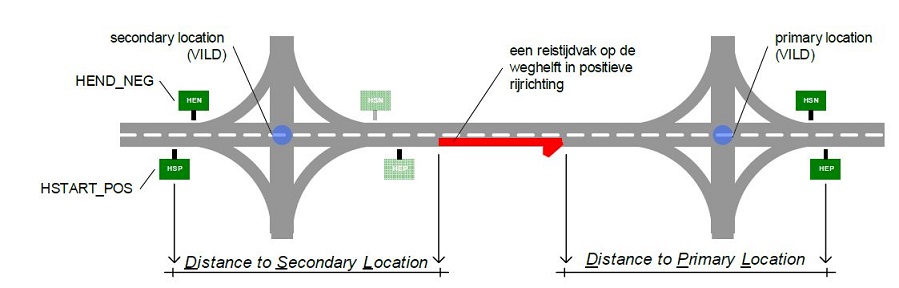
Het unieke nummer van de VILD locatie stroomafwaarts (2) en de afstand van de meetlocatie tot dit VILD punt (6) worden opgenomen in de class alertCMethod4PrimaryPointLocation in v2.3 of alertCMethod4PrimaryPointLocation in v3. Het unieke nummer van de VILD locatie stroomopwaarts (3) en de afstand tot dit VILD punt (8) worden opgenomen in de class alertCMethod4SecondaryPointLocation in v2.3 of alertCMethod4SecondaryPointLocation in v3. De VILD richting (4) wordt opgenomen in de class AlertCDirection.
Decoderen van een meetvak op basis van VILD/ALERT-C
De volgende stappen beschrijven hoe vanuit de VILD/ALERT-C locatiereferentie het traject op de weg van het meetvak kunt bepalen, aan de hand van de informatie opgenomen in het DATEX II element ItineraryByIndexedLocations in v2.3 of ItineraryByIndexedLocations in v3. Indien er gebruik is gemaakt van meerdere Linears, dienen de stappen te worden uitgevoerd per Linear in v2.3 of SingleRoadLinearLocation in v3.
- Start vanuit het primaire VILD punt van de Linear, gebruik tevens de VILD richting van het meetlocatie en de afstand tot het VILD punt
- Bepaal de wegnaam en het traject
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde van het veld LINREF
- Zoek in de VILD tabel het record op van de VILD weg, gebruik makende van de waarde van het LINREF
- De wegnaam is opgenomen in het veld ROADNUMBER, het traject is af te leiden uit de namen in de velden FIRST_NAME en SECND_NAME
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bereken de meter positie van de meetlocatie
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HEND_POS - (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HEND_NEG - (-1 * HECTO_DIR * [afstand to het VILD punt])
- Bepaal de hectometer waarde van het secundaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bereken de meter positie van de meetlocatie
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HSTART_POS + (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HSTART_NEG + (-1 * HECTO_DIR * [afstand to het VILD punt])
- Leidt de baan af waarop de meetlocatie zich bevindt door middel van de waarde van het DATEX II element carriageway
De positie op de weg van de Linear kan hiermee worden beschreven als wegnaam, traject, baan en meterpositie.
Aanvullende locatie informatie
Indien meetlocaties niet volledig op de hoofdrijbaan liggen dient aanvullende informatie gegeven te worden om de locaties goed te kunnen plaatsen. Indien een meetlocatie bestaande uit meetpunten niet op de hoofdrijbaan ligt, maar op een toe- of afrit, of parallelbaan, dan dient het element carriageway binnen supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 of supplementaryPositionalDescription -> carriageway in v3 te worden gebruikt. Deze verschijnt dan één keer.
Voor meetvakken die beginnen of eindigen op een rijbaan anders dan de hoofdrijbaan geldt dat deze aanvullende locatie informatie moeten meekrijgen met behulp van het element carriageway binnen supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 of supplementaryPositionalDescription -> carriageway in v3. Dit element carriageway dient altijd 2 keer opgenomen te worden (per linear) voor een meetvak:
- Voor de primaire locatie
- Voor de secundaire locatie.
De mogelijke waarden zijn:
- connectingCarriageway: Voor de verbindingsweg op een knooppunt van snelwegen
- entrySlipRoad: Voor de toerit
- exitSlipRoad: Voor de afrit
- mainCarriageway: Voor de hoofdrijbaan
- parallelCarriageway: Voor de parallelbaan
Verwijzing naar DATEXII element supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 of supplementaryPositionalDescription -> carriageway in v3.
Ga terug naar de vorige pagina