Location Reference VILD/ALERT-C for Traffic Data
Introduction
Traffic data is collected at a specific point on the road (measurement point) or as a section along the road (measurement section). To specify the exact location of data collection, a location reference based on VILD/ALERT-C is used. The method for setting up and interpreting the location reference differs for measurement points and measurement sections.
Location Reference for Measurement Points
Below are several examples of data collection at a point on the road.
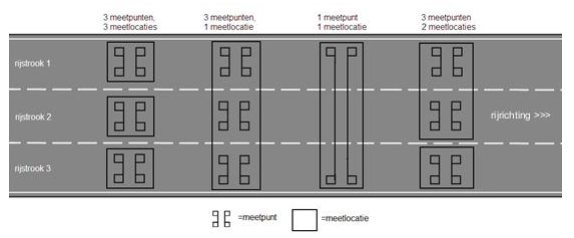
The illustration above explains the distinction between a measurement point and a measurement location. A measurement location consists of (one or more) measurement points. The location reference in DATEX II is described based on the direction of traffic, the upstream nearest VILD point, and the distance between the VILD location and the measurement location.
Using the example below, the method of determining the location reference is described. Measurement locations are visible as green circles, and VILD points as blue circles. The measurement location being explained is selected with the red circle.

For support, the schematic representation of the situation, containing only relevant information, is shown below.
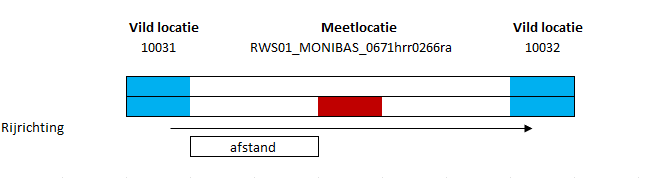
The VILD information for the displayed points is listed below.

Encoding a Measurement Location Based on VILD/ALERT-C
The following steps describe how to determine the direction of traffic, the upstream nearest VILD point, and the distance between the VILD location and the measurement location.
!!! warning "Deviation in determining VILD location" The description below uses intentionally different definitions for the primary and secondary location, due to the exceptional situation in the Netherlands, chosen to describe a measurement location.
- Start from the point of the measurement location
- Determine the primary VILD point of the measurement location by finding the nearest allowed VILD point upstream (before the measurement location, based on the direction of traffic). The VILD point has a unique number for identification.
- Take into account the points excluded for AVG purposes. For more information, see Locatietype punten.
- In the example above, the location number of the found VILD point is 10031
- Determine the secondary VILD point of the measurement location by selecting the nearest VILD point downstream (after the measurement location, based on the direction of traffic). The VILD point has a unique number for identification.
- No need to consider VILD points excluded for AVG purposes.
- In the example above, the location number of the found VILD point is 10032
- Determine the VILD direction of the measurement location, which can be positive or negative. Do this by following the chain from the primary VILD point to the secondary VILD point, starting from the primary VILD point.
- Check if the VILD direction is positive. Follow these steps:
- Look up the record of the VILD point in the VILD table using the location number
- Find the value of the POS_OFF field
- If the value of the POS_OFF field matches the secondary VILD point, the VILD direction is positive
- If the POS_OFF field value is not the same, repeat steps 1-3 based on the value of the POS_OFF field of the current VILD table record until the value 0 is found or the primary VILD point's value is reached
- Check if the VILD direction is negative. Follow these steps:
- Look up the record of the VILD point in the VILD table using the location number
- Find the value of the NEG_OFF field
- If the value of the NEG_OFF field matches the secondary VILD point, the VILD direction is negative
- If the NEG_OFF field value is not the same, repeat steps 1-3 based on the value of the NEG_OFF field of the current VILD table record until the value 0 is found or the primary VILD point's value is reached
- In the example above, the VILD direction is positive, as the POS_OFF field of the VILD record 10031 contains the value of the secondary VILD point.
- Determine the hectometer value of the primary VILD point
- Look up the record of the VILD point in the VILD table using the location number
- If the VILD direction is positive, the hectometer value of the primary VILD point equals the value of the HSTART_POS field
- If the VILD direction is negative, the hectometer value of the primary VILD point equals the value of the HSTART_NEG field
- Determine the distance to the VILD location by calculating the length between the meter position of the primary VILD point and the meter position of the measurement location
- The hectometer position of the VILD point is determined in step 5, and the meter position is the hectometer position * 100
- The meter position of the measurement location must be known by the party collecting the data
- The distance is determined by calculating the absolute difference between both meter positions: ABS(meter position of the primary VILD point - meter position of the measurement location)
- In the above example, the hectometer of the VILD point is 256, so the meter position is 25600. The meter position of the measurement location is 26630. The distance to the VILD location is 1030 meters (26630-25600). The primary VILD point, the VILD direction, and the distance from the measurement location to the VILD point must be included in the DATEX II element AlertCPoint.
Decoding a Measurement Location Based on VILD/ALERT-C
The following steps describe how to determine the position on the road of the measurement location based on the VILD/ALERT-C location reference, using the information found in the DATEX II element AlertCPoint in v2.3 or AlertCPoint in v3:
- Start from the primary VILD point of the measurement location, also use the VILD direction of the measurement location and the distance to the VILD point
- Determine the road name and the section
- Look up the record of the VILD point in the VILD table using the location number
- Look up the value of the LINREF field
- Look up the record of the VILD road in the VILD table using the value of the LINREF
- The road name is listed in the ROADNUMBER field, and the section is derived from the names in the FIRST_NAME and SECND_NAME fields
- Determine the hectometer value of the primary VILD point
- Look up the record of the VILD point in the VILD table using the location number
- If the VILD direction is positive, the hectometer value of the primary VILD point equals the value of the HSTART_POS field
- If the VILD direction is negative, the hectometer value of the primary VILD point equals the value of the HSTART_NEG field
- Calculate the meter position of the measurement location
- Look up the record of the VILD point in the VILD table using the location number
- Look up the value of the HECTO_DIR field
- If the VILD direction is positive, the meter position equals HSTART_POS + (HECTO_DIR * [distance to the VILD point])
- If the VILD direction is negative, the meter position equals HSTART_NEG + (-1 * HECTO_DIR * [distance to the VILD point])
- Derive the lane in which the measurement location is located using the value of the DATEX II element carriageway
The position of the measurement location on the road can be described as the road name, section, lane, and meter position.
Location Reference for Measurement Sections
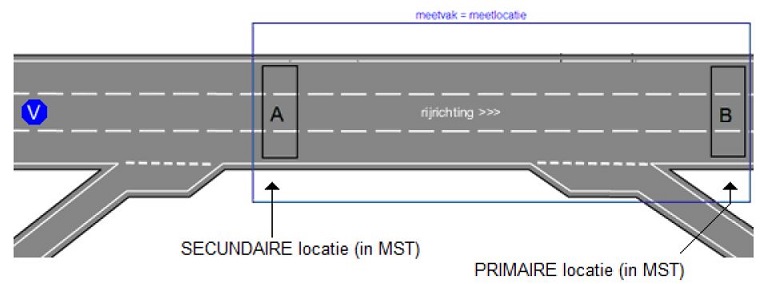
Using a measurement section, a stretch of the road is identified where data collection takes place. In this case, the measurement location is the entire section.
Below is an example of data collection along a road section.
When describing the location reference for a measurement section in DATEX II based on VILD/ALERT-C, it's important to know that a section in VILD/ALERT-C always starts and ends on the same VILD road. This means that if a measurement section starts on road A and ends on road B, two adjacent VILD/ALERT-C sections must be included in DATEX II. This is solved in the DATEX II data model by using the ItineraryByIndexedLocations element. Multiple locations can be described as lines ([Linear]( (Linear) or points (AlertCPoint).
!!! warning "Handling Connecting Roads" If part of the measurement section runs via a connecting road (connectingCarriageway), a separate linear must be included for this part of the road. For example, in the case of a measurement section starting on highway 1 and running via a connecting road to the endpoint on highway 2, a total of 3 linears should be used: linear1 on highway 1, linear2 on the connecting road, and linear3 on highway 2.
Coding a measurement section based on VILD/ALERT-C
A measurement section is defined per Linear in v2.3 or SingleRoadLinearLocation in v3 based on the traffic direction, the closest upstream and downstream VILD locations, and the distance to these locations. The following steps describe how to determine the above-mentioned values:
- Start from the center of the Linear/measurement section.
- Determine the primary VILD point. Do this by finding the nearest allowed VILD point downstream (i.e., after the Linear/measurement section, based on the traffic direction). The VILD point has a unique number for identification.
- Take into account points excluded for AVG purposes. See Location Type Points.
- Determine the secondary VILD point of the measurement location. Do this by finding the nearest VILD point upstream (i.e., before the Linear/measurement section, based on the traffic direction). The VILD point has a unique number for identification.
- Take into account points excluded for AVG purposes. See Locatietype points.
- Determine the VILD direction of the measurement location; it can be either positive or negative. Do this by following the chain from the primary VILD point to the secondary VILD point, starting at the primary VILD point.
- Check if the VILD direction is positive. Follow these steps:
- Search in the VILD table for the record of the VILD point, using the location number.
- Look up the value of the field POS_OFF.
- If the value of the POS_OFF field equals the primary VILD point, then the VILD direction is positive.
- If the POS_OFF field value does not match, repeat steps 1-3 based on the POS_OFF field value of the current VILD table record until the value 0 or the value of the secondary VILD point is found.
- Check if the VILD direction is negative. Follow these steps:
- Search in the VILD table for the record of the VILD point, using the location number.
- Look up the value of the field NEG_OFF.
- If the value of the NEG_OFF field equals the primary VILD point, then the VILD direction is negative.
- If the NEG_OFF field value does not match, repeat steps 1-3 based on the NEG_OFF field value of the current VILD table record until the value 0 or the value of the secondary VILD point is found.
- Check if the VILD direction is positive. Follow these steps:
- Determine the hectometer value of the primary VILD point.
- Search in the VILD table for the record of the VILD point, using the location number.
- If the VILD direction is positive, the hectometer value of the primary VILD point is the value of the field HEND_POS.
- If the VILD direction is negative, the hectometer value of the primary VILD point is the value of the field HEND_NEG.
- Determine the distance to the primary VILD point by calculating the length between the meter position of the primary VILD point and the meter position of the measurement location.position is the hectometer position * 100.
- The meter position of the measurement location should be known to the party responsible for the data collection.
- Determine the distance by calculating the absolute difference between both meter positions: ABS(meter position of the primary VILD point - meter position of the measurement location).
- Determine the hectometer value of the secondary VILD point.
- Search in the VILD table for the record of the VILD point, using the location number.
- If the VILD direction is positive, the hectometer value of the secondary VILD point is the value of the field HSTART_POS.
- If the VILD direction is negative, the hectometer value of the secondary VILD point is the value of the field HSTART_NEG.
- Determine the distance to the secondary VILD point by calculating the length between the meter position of the secondary VILD point and the meter position of the measurement location.
- The hectometer position of the VILD point is determined in step 7; the meter position is the hectometer position * 100.
- The meter position of the measurement location should be known to the party responsible for the data collection.
- Determine the distance by calculating the absolute difference between both meter positions: ABS(meter position of the secondary VILD point - meter position of the measurement location).
See the illustration below for a visualization of the method of determining the location reference.
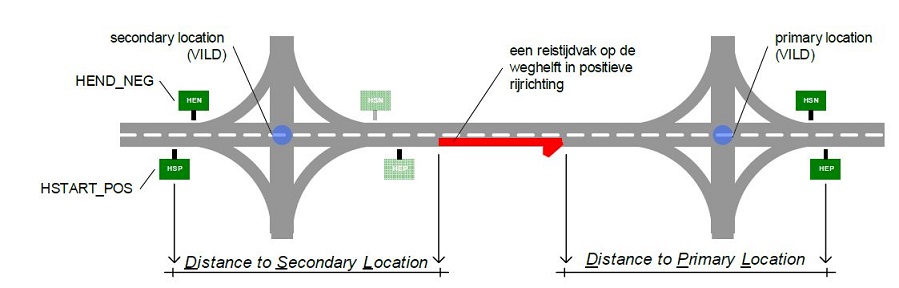
The unique number of the downstream VILD location (2) and the distance from the measuring location to this VILD point (6) are recorded in the class alertCMethod4PrimaryPointLocation in v2.3 or alertCMethod4PrimaryPointLocation in v3. The unique number of the upstream VILD location (3) and the distance to this VILD point (8) are recorded in the class alertCMethod4SecondaryPointLocation in v2.3 of alertCMethod4SecondaryPointLocation in v3. De VILD richting (4) wordt opgenomen in de class AlertCDirection.
Decoding a measurement section based on VILD/ALERT-C
The following steps describe how to determine the route on the road of the measuring section from the VILD/ALERT-C location reference, based on the information recorded in the DATEX II element ItineraryByIndexedLocations in v2.3 of ItineraryByIndexedLocations in v3. If multiple Linears are used, the steps should be performed per Linear in v2.3 or SingleRoadLinearLocation in v3.
- Start from the primary VILD point of the Linear, also use the VILD direction of the measuring location and the distance to the VILD point.
- Determine the road name and the route.
- Look up the record for the VILD point in the VILD table using the location number.
- Look up the value of the field LINREF.
- Look up the record for the VILD road in the VILD table using the value of LINREF.
- The road name is in the field ROADNUMBER, and the route can be derived from the names in the fields FIRST_NAME and SECND_NAME.
- Determine the hectometer value of the primary VILD point.
- Look up the record for the VILD point in the VILD table using the location number.
- If the VILD direction is positive, the hectometer value of the primary VILD point is equal to the value of the field HEND_POS.
- IIf the VILD direction is negative, the hectometer value of the primary VILD point is equal to the value of the field HEND_NEG.
- Calculate the meter position of the measuring location
- Look up the record for the VILD point in the VILD table using the location number.
- Look up the value of the field HECTO_DIR.
- If the VILD direction is positive, the meter position is equal to HEND_POS - (HECTO_DIR * [distance to the VILD point]).
- If the VILD direction is negative, the meter position is equal to HEND_NEG - (-1 * HECTO_DIR * [distance to the VILD point]).
- Determine the hectometer value of the secondary VILD point
- Look up the record for the VILD point in the VILD table using the location number.
- If the VILD direction is positive, the hectometer value of the secondary VILD point is equal to the value of the field HSTART_POS.
- If the VILD direction is negative, the hectometer value of the secondary VILD point is equal to the value of the field HSTART_NEG.
- Calculate the meter position of the measuring location.
- Look up the record for the VILD point in the VILD table using the location number.
- Look up the value of the field HECTO_DIR.
- If the VILD direction is positive, the meter position is equal to HSTART_POS + (HECTO_DIR * [distance to the VILD point]).
- If the VILD direction is negative, the meter position is equal to HSTART_NEG + (-1 * HECTO_DIR * [distance to the VILD point]).
- Derive the lane the measuring location is on using the value of the DATEX II element carriageway.
The position on the road of the Linear can then be described as road name, route, lane, and meter position.
Additional location information
If measuring locations do not fully lie on the main carriageway, additional information must be provided to properly place the locations. If a measuring location consisting of measurement points is not on the main carriageway but on an on-ramp, off-ramp, or parallel road, the carriageway element within supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 or supplementaryPositionalDescription -> carriageway in v3 should be used. This should appear once.
For measurement sections that start or end on a carriageway other than the main carriageway, this additional location information must be included using the carriageway element within supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 or supplementaryPositionalDescription -> carriageway in v3. This carriageway element must always be included twice (per linear) for a measurement section:
- For the primary location
- For the secondary location.
The possible values are:
- connectingCarriageway: For the connecting road at a highway interchange
- entrySlipRoad: For the entry ramp
- exitSlipRoad: For the exit ramp
- mainCarriageway: For the main carriageway
- parallelCarriageway: For the parallel road
Reference to DATEX II element supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 orsupplementaryPositionalDescription -> carriageway in v3.
Go back to the previous page