Locatiereferentiesysteem VILD/ALERT-C bij Situatieberichten
Inleiding
Situatieberichten beschrijving een gebeurtenis op de weg. Hierbij kan het gaan om een gebeurtenis op een specifiek punt op de weg (puntlocatie) of als traject op de weg (trajectlocatie). Om de exacte locatie van de gebeurtenis te specificeren wordt gebruik gemaakt van de locatiereferentie op basis van VILD/ALERT-C. De manier waarop de locatiereferentie dient te worden opgesteld en geïnterpreteerd is verschillend voor puntlocaties en trajectlocaties.
Locatiereferentie voor puntlocaties
Een puntlocatie wordt gedefinieerd aan de hand van de rijrichting van het verkeer, de stroomafwaarts dichtstbijzijnde VILD locatie en de afstand tot deze locatie. Met behulp van onderstaand voorbeeld is de manier beschreven waarop de locatiereferentie tot stand komt. In het voorbeeld is de puntlocatie zichtbaar als rode circel, de stroomafwaarts dichtstbijzijnde VILD locatie als blauwe circel. De afstand is beschreven als Distance to Primary Location.
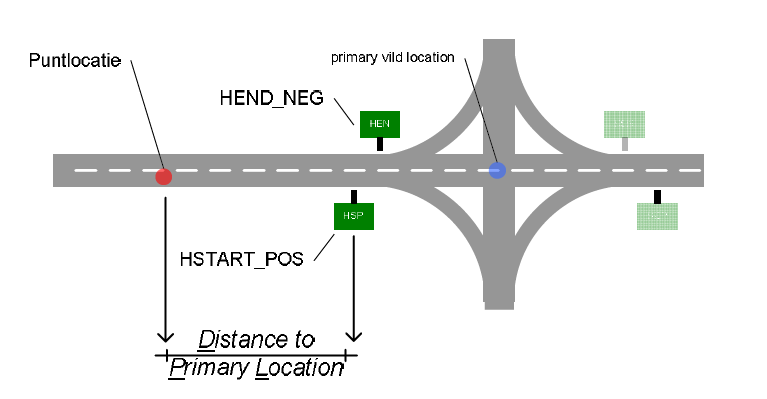
Plaatje moet worden bijgewerkt
In bovenstaande afbeelding is de Distance to Primary Location berekend op basis van de HSTART_POS waarde. Dit is onjuist, dit moet zijn berekend op basis van de HEND_POS waarde.
Coderen van een puntlocatie op basis van VILD/ALERT-C
De puntlocatie wordt gedefinieerd aan de hand van de rijrichting van het verkeer, de stroomafwaarts dichtstbijzijnde VILD locatie en de afstand tot deze locatie. De volgende stappen beschrijven hoe de de hierboven genoemde waarden kunt bepalen:
- Start vanuit de locatie van de gebeurtenis
- Bepaal het primaire VILD punt. Doe dit door het dichtstbijzijnde toegestane VILD punt stroomafwaarts te vinden (dus na de gebeurtenis gelegen, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor Situatieberichten uitgesloten punten. Zie hiervoor Locatietype punten.
- Bepaal het secundaire VILD punt van de gebeurtenis. Doe dit door het het dichtstbijzijnde VILD punt te selecteren stroomopwaarts (dus voor de gebeurtenis, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Hierbij hoef je geen rekening te houden met de uitgesloten VILD punten voor Situatieberichten.
- Bepaal de VILD richting van de meetlocatie, deze kan de waarde positief of negatief hebben. Doe dit door de keten te volgen om van het primaire VILD punt naar het secundaire VILD punt te komen, startende bij het primaire VILD punt.
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld POS_OFF
- Als de waarde van het veld POS_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting positief
- Als de waarde van het veld POS_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld POS_OFF van het huidige VILD tabel record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- Controleer of de VILD richting negatief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld NEG_OFF
- Als de waarde van het veld NEG_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting negatief
- Als de waarde van het veld NEG_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld NEG_OFF van het huidige VILD tabel record record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bepaal de afstand tot de VILD locatie door de lengte te berekenen tussen de meterpositie van het primaire VILD punt en de meterpositie van de gebeurtenis
- De hectometer positie van het VILD punt is vastgesteld in stap 5, de meterpositie is de hectometer positie * 100
- De meter positie van de gebeurtenis dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het primaire VILD punt - meterpositie van de gebeurtenis
Het primaire VILD punt, de VILD richting en de afstand van de gebeurtenis tot het VILD punt dienen opgenomen te worden in het DATEX II element AlertCPoint in v2.3 of AlertCPoint in v3.
In v3 is het daarnaast verplicht op de carriageway aanduiding op te nemen bij het primaire VILD punt. Hiervoor dient het element supplementaryPositionalDescription te worden gebruikt.
Decoderen van een puntlocatie op basis van VILD/ALERT-C
De volgende stappen beschrijven hoe vanuit de VILD/ALERT-C locatiereferentie de positie op de weg van de gebeurtenis kunt bepalen, aan de hand van de informatie opgenomen in het DATEX II element AlertCPoint in v2.3 of AlertCPoint in v3:
- Start vanuit het primaire VILD punt van de gebeurtenis, gebruik tevens de VILD richting van de gebeurtenis en de afstand tot het VILD punt
- Bepaal de wegnaam en het traject
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde van het veld LINREF
- Zoek in de VILD tabel het record op van de VILD weg, gebruik makende van de waarde van het LINREF
- De wegnaam is opgenomen in het veld ROADNUMBER, het traject is af te leiden uit de namen in de velden FIRST_NAME en SECND_NAME
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bereken de meter positie van de gebeurtenis
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HEND_POS - (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HEND_NEG - (-1 * HECTO_DIR * [afstand to het VILD punt])
- Leidt de baan af waarop de gebeurtenis zich bevindt door middel van de waarde van het DATEX II element carriageway
De positie op de weg van de gebeurtenis kan hiermee worden beschreven als wegnaam, traject, baan en meterpositie.
Locatiereferentie voor trajectlocaties
Een trajectlocatie gedefinieerd aan de hand van de rijrichting van het verkeer, de stroomopwaarts en -afwaarts dichtstbijzijnde VILD locaties en de afstand tot deze locaties. Met behulp van onderstaand voorbeeld is de manier beschreven waarop de locatiereferentie tot stand komt. In het voorbeeld is de trajectlocatie zichtbaar als rode lijn, de stroomafwaarts en stroomopwaarts dichtstbijzijnde VILD locaties als blauwe circels. De afstanden zijn beschreven als Distance to Primary Location en Distance to Secondary Location.
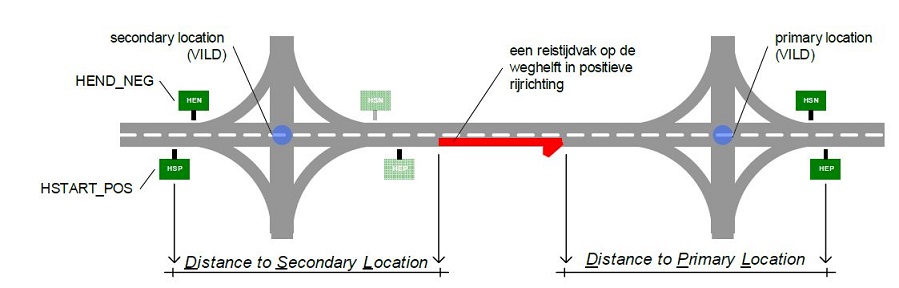
Bij het beschrijven van locatiereferentie van een trajectlocatie zijn in DATEX II op basis van VILD/ALERT-C, is het van belang te weten dat een traject in VILD/ALERT-C altijd dient te starten en eindigen op dezelfde VILD-weg. Dit betekent dat als een trajectlocatie start op weg A en eindigt op weg B, er twee aansluitende VILD/ALERT-C trajecten dienen te worden opgenomen in DATEX II. Dit is opgelost in het DATEX II datamodel door gebruik te maken van het element ItineraryByIndexedLocations in v2.3 of ItineraryByIndexedLocations in v3. Onder dit element kunnen meedere locaties als lijn (Linear in v2.3 of SingleRoadLinearLocation in v3) beschreven worden.
Coderen van een trajectlocatie op basis van VILD/ALERT-C
Een trajectlocatie wordt per Linear in v2.3 of SingleRoadLinearLocation in v3 gedefinieerd aan de hand van de rijrichting van het verkeer, de stroomopwaarts en -afwaarts dichtstbijzijnde VILD locaties en de afstand tot deze locaties. De volgende stappen beschrijven hoe je de hierboven genoemde waarden kunt bepalen:
- Start vanuit het middelpunt van de Linear/de trajectlocatie
- Bepaal het primaire VILD punt. Doe dit door het dichtstbijzijnde toegestane VILD punt stroomafwaarts (dus na de Linear/de trajectlocatie, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor Situatieberichten uitgesloten punten. Zie hiervoor Locatietype punten.
- Bepaal het secundaire VILD punt van de trajectlocatie. Doe dit door het het dichtstbijzijnde VILD punt te selecteren stroomopwaarts te vinden (dus voor de Linear/de trajectlocatie gelegen, uitgaande van de rijrichting). Het VILD punt kent een uniek nummer ter identificatie.
- Houd hier rekening met de voor Situatieberichten uitgesloten punten. Zie hiervoor Locatietype punten.
- Bepaal de VILD richting van de meetlocatie, deze kan de waarde positief of negatief hebben. Doe dit door de keten te volgen om van het primaire VILD punt naar het secundaire VILD punt te komen, startende bij het primaire VILD punt.
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld POS_OFF
- Als de waarde van het veld POS_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting positief
- Als de waarde van het veld POS_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld POS_OFF van het huidige VILD tabel record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- Controleer of de VILD richting negatief is. Volg hierbij de volgende stappen:
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld NEG_OFF
- Als de waarde van het veld NEG_OFF gelijk is aan het primaire VILD punt, dan is de VILD richting negatief
- Als de waarde van het veld NEG_OFF niet gelijk is, herhaal dan stappen 1 t/m 3 op basis van de waarde op van het veld NEG_OFF van het huidige VILD tabel record record totdat de waarde 0 is gevonden of de waarde van het secundaire VILD punt
- In bovenstaand voorbeeld is de VILD richting positief, doordat het veld POS_OFF van VILD record 10031 de waarde kent van het secundaire VILD punt
- Controleer of de VILD richting postief is. Volg hierbij de volgende stappen:
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bepaal de afstand tot het primaire VILD punt door de lengte te berekenen tussen de meterpositie van het primaire VILD punt en de meterpositie van de trajectlocatie
- De hectometer positie van het VILD punt is vastgesteld in stap 5, de meterpositie is de hectometer positie * 100
- De meter positie van de trajectlocatie dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het primaire VILD punt - meterpositie van de trajectlocatie
- Bepaal de hectometer waarde van het secundaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bepaal de afstand tot het secundaire VILD punt door de lengte te berekenen tussen de meterpositie van het secundaire VILD punt en de meterpositie van de trajectlocatie
- De hectometer positie van het VILD punt is vastgesteld in stap 7, de meterpositie is de hectometer positie * 100
- De meter positie van de trajectlocatie dient bekend te zijn bij de partij die de inwinning verzorgt
- De afstand bepaal je door het absolute verschil te berekenen tussen beide meterposities ABS(meterpositie van het secundaire VILD punt - meterpositie van de trajectlocatie)
Het unieke nummer van de VILD locatie stroomafwaarts (2) en de afstand van de trajectlocatie tot dit VILD punt (6) worden opgenomen in de class alertCMethod4PrimaryPointLocation in v2.3 of alertCMethod4PrimaryPointLocation in v3. Het unieke nummer van de VILD locatie stroomopwaarts (3) en de afstand tot dit VILD punt (8) worden opgenomen in de class alertCMethod4SecondaryPointLocation in v2.3 of alertCMethod4SecondaryPointLocation in v3. De VILD richting (4) wordt opgenomen in de class AlertCDirection.
In v3 is het daarnaast verplicht op de carriageway aanduiding op te nemen bij het primaire en het secundaire VILD punt. Hiervoor dienen de elementen supplementaryPositionalDescription en secondarySupplementaryDescription te worden gebruikt.
Decoderen van een trajectlocatie op basis van VILD/ALERT-C
De volgende stappen beschrijven hoe vanuit de VILD/ALERT-C locatiereferentie de trajectlocatie kunt bepalen, aan de hand van de informatie opgenomen in het DATEX II element ItineraryByIndexedLocations in v2.3 of ItineraryByIndexedLocations in v3. Indien er gebruik is gemaakt van meerdere Linears, dienen de stappen te worden uitgevoerd per Linear in v2.3 of SingleRoadLinearLocation in v3.
- Start vanuit het primaire VILD punt van de Linear, gebruik tevens de VILD richting van het trajectlocatie en de afstand tot het VILD punt
- Bepaal de wegnaam en het traject
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde van het veld LINREF
- Zoek in de VILD tabel het record op van de VILD weg, gebruik makende van de waarde van het LINREF
- De wegnaam is opgenomen in het veld ROADNUMBER, het traject is af te leiden uit de namen in de velden FIRST_NAME en SECND_NAME
- Bepaal de hectometer waarde van het primaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het primaire VILD punt gelijk aan de waarde van het veld HEND_NEG
- Bereken de meter positie van de trajectlocatie
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HEND_POS - (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HEND_NEG - (-1 * HECTO_DIR * [afstand to het VILD punt])
- Bepaal de hectometer waarde van het secundaire VILD punt
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Indien de VILD richting positief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_POS
- Indien de VILD richting negatief is, is de hectometer waarde van het secundaire VILD punt gelijk aan de waarde van het veld HSTART_NEG
- Bereken de meter positie van de trajectlocatie
- Zoek in de VILD tabel het record op van het VILD punt, gebruik makende van het locatienummer
- Zoek de waarde op van het veld HECTO_DIR
- Indien de VILD richting positief is, is de meterpositie gelijk aan HSTART_POS + (HECTO_DIR * [afstand to het VILD punt])
- Indien de VILD richting negatief is, is de meterpositie gelijk aan HSTART_NEG + (-1 * HECTO_DIR * [afstand to het VILD punt])
- Leidt de baan af waarop de trajectlocatie zich bevindt door middel van de waarde van het DATEX II element carriageway
De positie op de weg van de Linear kan hiermee worden beschreven als wegnaam, traject, baan en meterpositie.
Locatiereferentie voor gebiedslocaties
Een gebiedslocatie wordt gedefinieerd aan de hand van de kleinst mogelijke omsluitende gebiedslocatie in de VILD. Hierbij dient het element alertCArea in v2.3 of alertCArea in v3 te worden gebruikt.
Aanvullende locatie informatie
DATEXII v2.3 specifiek
Indien trajectlocaties niet volledig op de hoofdrijbaan liggen dient aanvullende informatie gegeven te worden om de locaties goed te kunnen plaatsen. Indien een puntlocatie niet op de hoofdrijbaan ligt, maar op een toe- of afrit, of parallelbaan, dan dient het element carriageway binnen supplementaryPositionalDescription -> affectedCarriagewayAndLanes. Deze verschijnt dan één keer.
Voor trajectlocaties die beginnen of eindigen op een rijbaan anders dan de hoofdrijbaan geldt dat deze aanvullende locatie informatie moeten meekrijgen met behulp van het element carriageway binnen supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3. Dit element carriageway dient altijd 2 keer opgenomen te worden (per linear) voor een trajectlocatie:
- Voor de primaire locatie
- Voor de secundaire locatie.
DATEXII v3 specifiek
Alle locaties dienen te worden voorzien van een aanduiding van de rijbaan. Dit gebeurt door middel van element carriageway binnen supplementaryPositionalDescription -> carriageway.
Indien er sprake is van een trajectlocatie, dient de aanduiding van de rijbaan van de primaire locatie te worden opgenomen in supplementaryPositionalDescription -> carriageway. De aanduiding van de rijbaan van de secundaire locatie dient te worden opgenomen in secondarySupplementaryDescription.
Toeliching rijbaanaanduiding
De mogelijke waarden voor de rijbaanaanduiding zijn:
- connectingCarriageway: Voor de verbindingsweg op een knooppunt van snelwegen
- entrySlipRoad: Voor de toerit
- exitSlipRoad: Voor de afrit
- mainCarriageway: Voor de hoofdrijbaan
- parallelCarriageway: Voor de parallelbaan
Zie voor nadere informatie over carriageway de toelihting op supplementaryPositionalDescription -> affectedCarriagewayAndLanes in v2.3 of supplementaryPositionalDescription -> carriageway in v3.
Go back to the previous page